¶ 原因
伴随N1轴偏移量校准和启用Home点,会带来一些功能改变和影响,我们需要做进一步的调整和检查。
¶ 本章需要进行3项操作
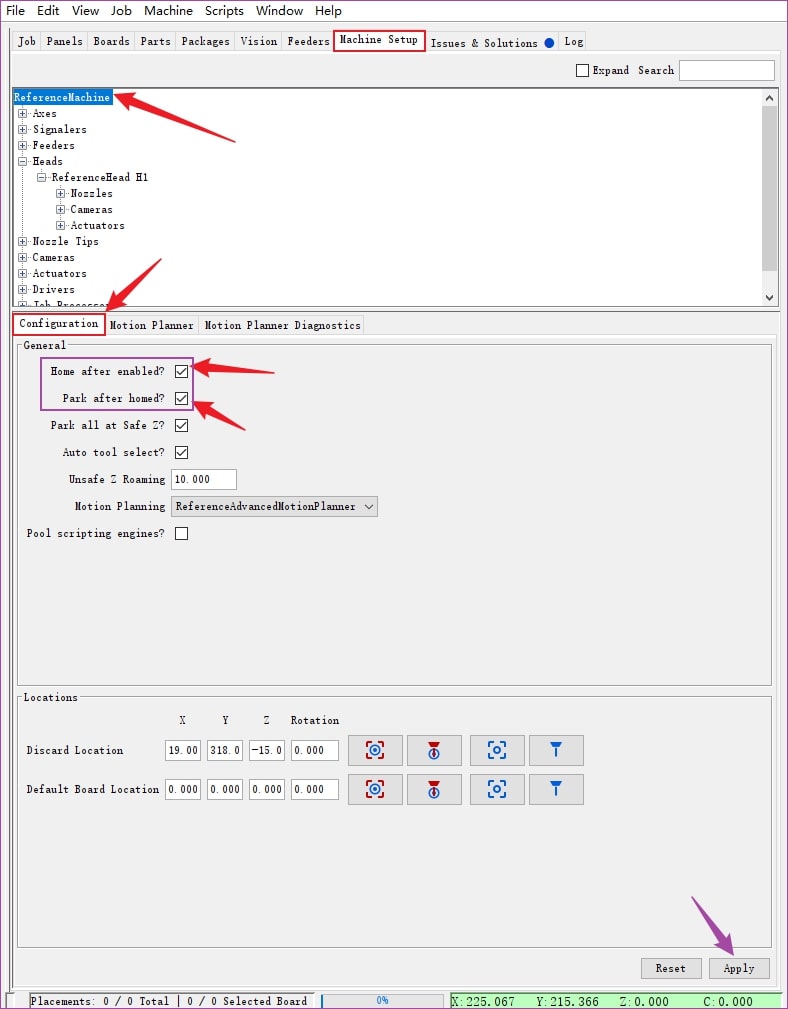
1、启用新功能项:勾选并启用 Home after enable?和 Park after homed?
2、检查软极限:检查X轴和Y轴的软极限,或者对其重新定义。
3、重新软启动。
¶ 1、启用新功能项
说明:
- Home after enable?:启用后,当点击软件左下角绿色软开机按钮时,贴片机将自动执行Home点的回归动作,类似自动帮您点击了小房子。
- Park after homed?:Home回归完成后,贴装头自动驶入停靠点,进入待命状态。
操作:
进入下图位置,勾选这两个选项,别忘了点击右下角的Apply按钮。
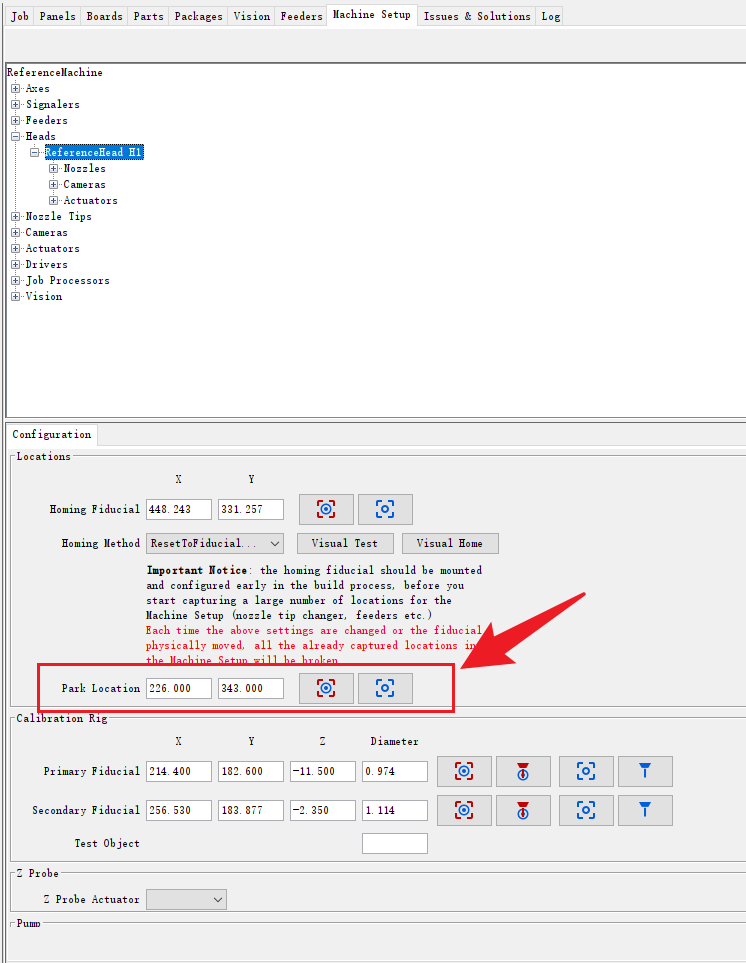
停靠点位置的定义,如下图所示。
重新定义停靠点的位置后,别忘了右下角的Apply按钮。
¶ 2、检查软极限
说明:
① 软极限,限定出了贴装头可以在X轴和Y轴上的运动范围,保护着贴装头的运行安全。
② 根据经验,初始的极限坐标值所对应的实际到达位置,一般都是合适的,不需要重新定义或修改。
③ 但是,我们还是强烈建议您对各个软限位,做一次实际到达位置的确认和检查。
- 因为之后X轴和Y轴反向间隙的校准中,贴装头需要运动到这些极限位置。
④ (请注意这项要求)如果您需要对某个轴的某一个软极限做修改,请严格按照教程进行操作。(20250313修改)
- 因为任一软极限数值被修改和应用后,当前正在使用的贴片机坐标系,会在某种定程度上发生一些改变(被延展或者被压缩)。
- 要求您,1次只修改某个轴的1个软极限值。一旦Apply了某一新的软极限值,必须返回停靠点,点击小黑房子重新执行一次Home点回归,重新建立坐标系!!!
- 例如,您当前修改并应用了新的Y轴的负向软限位数值,必须在重新完成回归Home点后,再去对Y轴正向的软限位做检查或者修改。
⑤ 正常情况下,软极限数值修改后的数值并不会严重偏离初始值,基本都在±2mm以内。
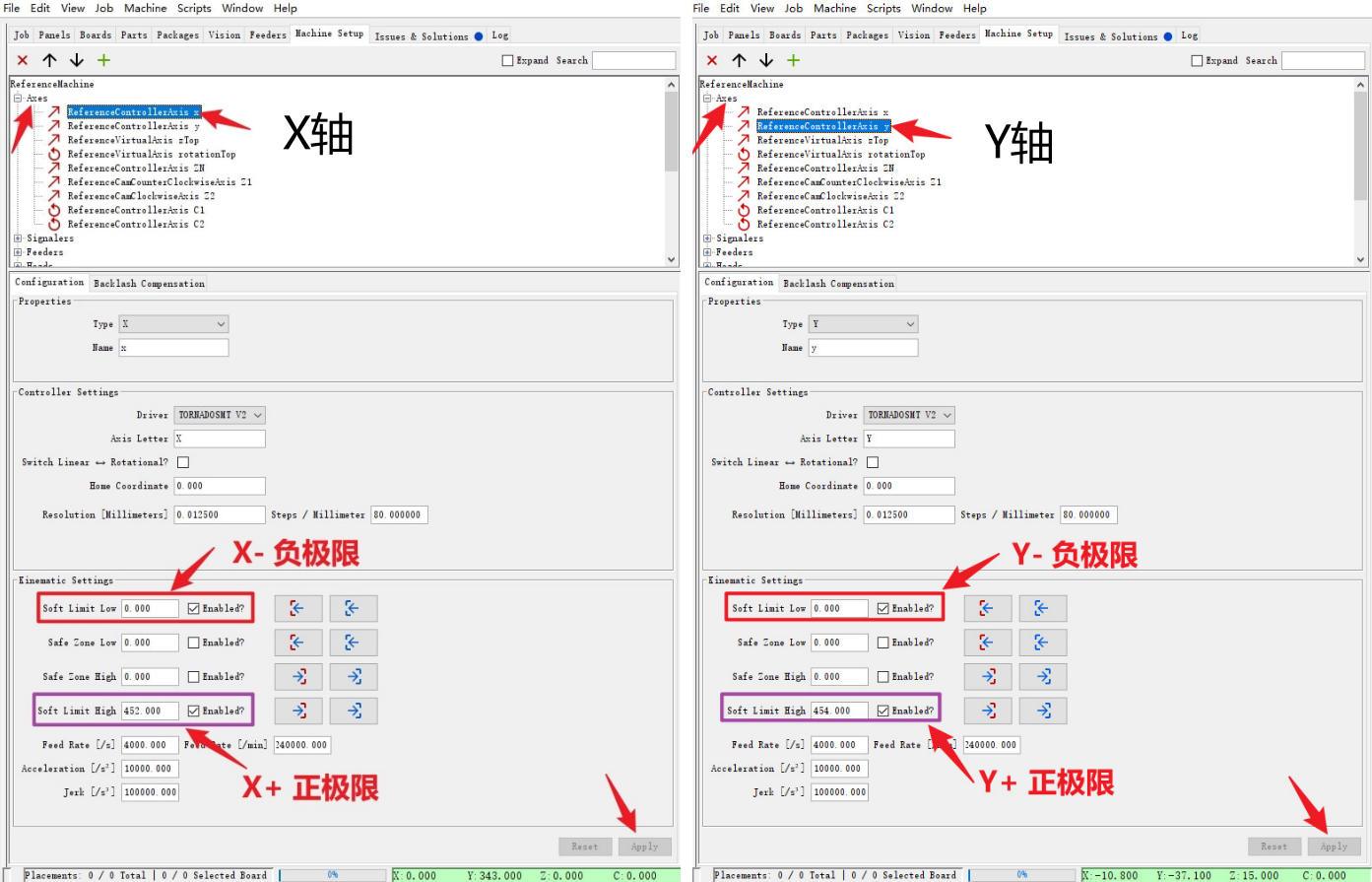
初始值如下表所示:
| Soft Limit Low | Soft Limit High | |
| 负向软极限值 | 正向软极限值 | |
| X轴初始值 | 0 | 452 |
| Y轴初始值 | 0 | 454 |
如果发现修改值与初始值,相差很大,肯定是哪个地方的操作出现了失误或错误。
请按如下步骤进行:
① 请将当前轴的软极限数值修改为上表的初始值,并Apply,返回停靠点。
② 点击软关机按钮,然后按压复位开关3秒钟。
③ 点击软开机按钮,待执行完成Home点的回归停靠至停靠点后,重新进行软极限的检查。
准备:
- 首先,务必清空 N1N2以及吸嘴坞中摆放的吸嘴,以及贴片机台面上有可能存在的障碍物,以免碰撞。
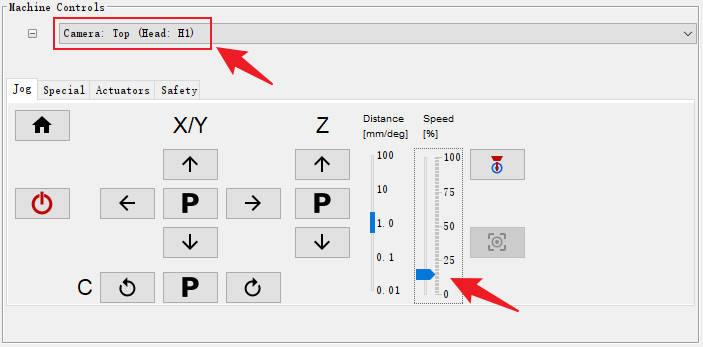
- 在Jog操作面板里点击X/Y的P键,让贴装头前往停靠点。
- 然后,检查并选择 Machine Controls(机器控件)里的操控对象为 Camera:Top(Head:H1) ,如下图所示。
X和Y轴的软极限:
检查: (20250313更新)
在Jog操控面板,选择合适的步进间距,将Speed[%]的速度调整到25左右,降速运行。
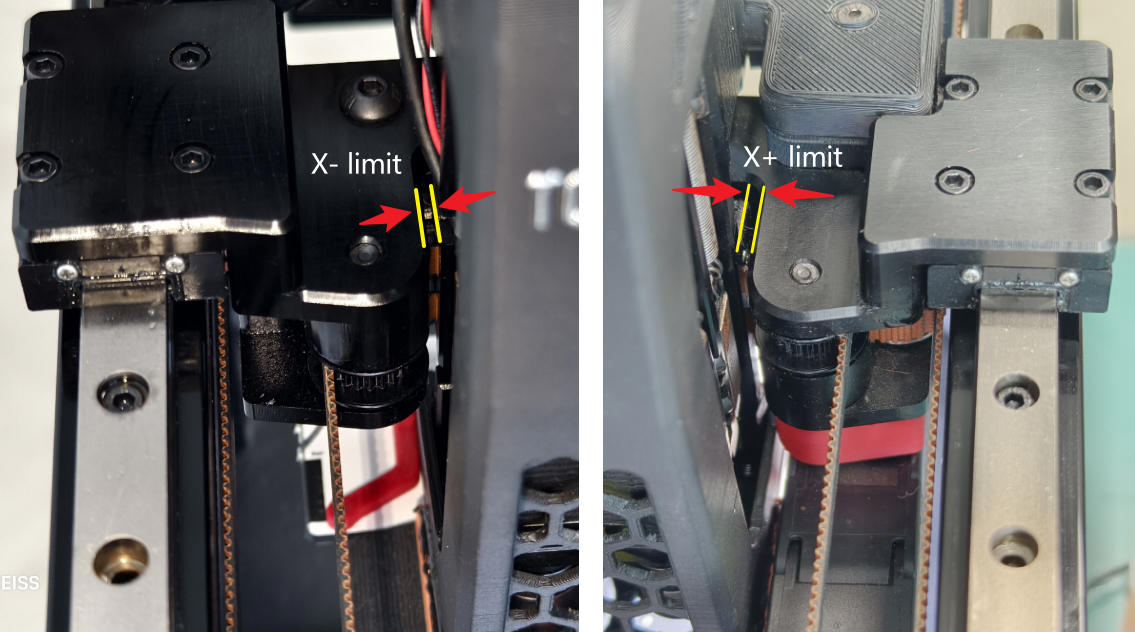
1、在X方向上移动贴装头,逐渐朝着 X+ 或 X- 的方向移动,与此同时,需要您观察贴装头滑块和X轴左右两端尽头,共计2处位置之间的剩余距离。
- 当 X=0 和 X=452时,剩余距离接近1~2mm的样子,而且未产生任何接触或碰撞,则此时,检查结果为合格的,无需修改X轴的软极限值。
此外,在接近X=452的过程中,如果听到X正向微动开关的咔哒声,是正常的。
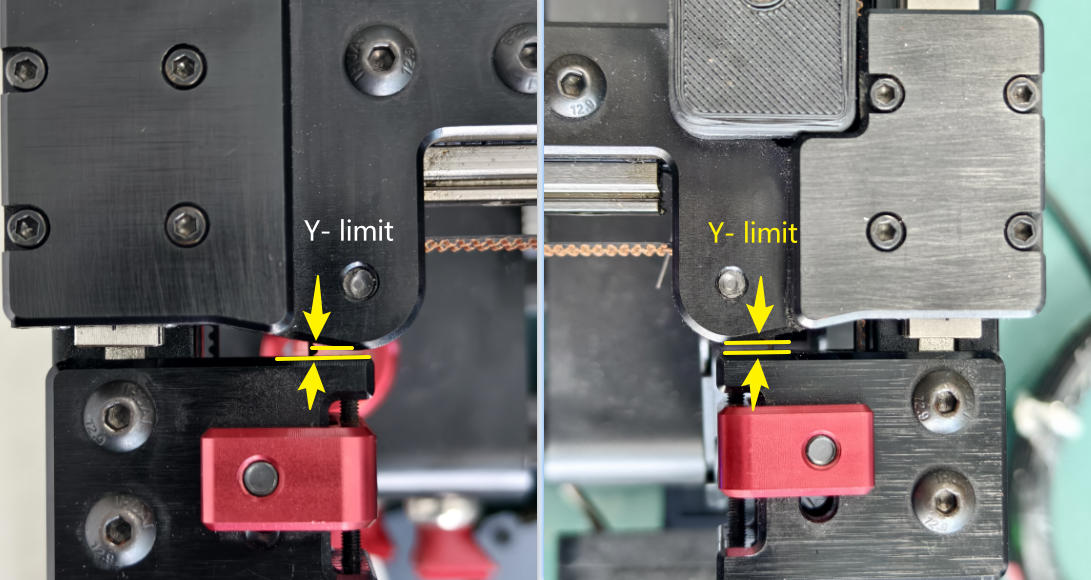
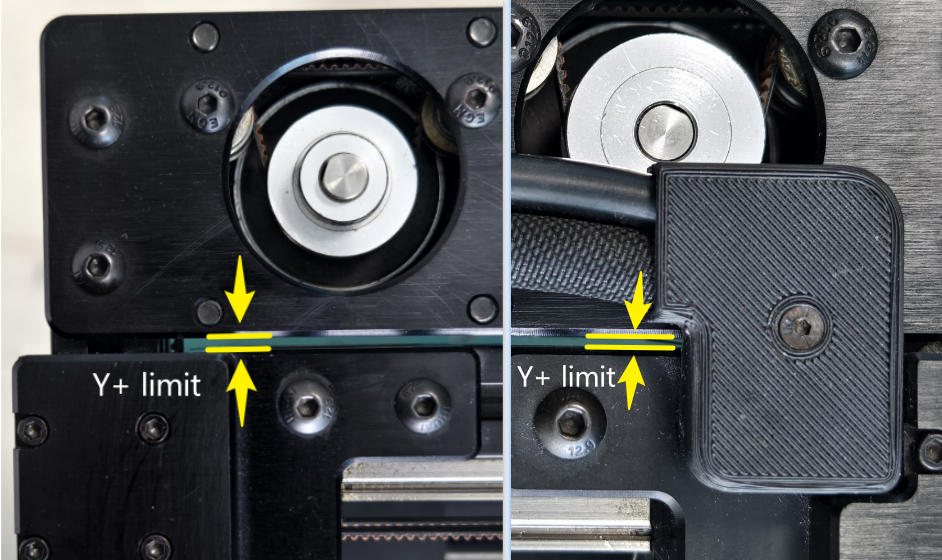
2、在Y方向上移动贴装头,逐渐朝着 Y+ 或 Y- 的方向移动,与此同时,需要您观察X轴左右两侧,分别与Y轴前后两端尽头,共计4处位置之间的剩余距离。
- 当 Y=0 和 Y=454时,剩余距离接近1~2mm的样子,而且未产生任何接触或碰撞,则此时,检查结果为合格的,无需修改Y轴的软极限值。
此外,在接近Y=454的过程中,如果听到Y正向微动开关的咔哒声,也是正常的。
请参考以下极限位置的示例照片。(拍摄方向,站在贴片机前方)
重定义: (20250313更新)
要求您,1次只修改某个轴的1个软极限值。请按照以下操作顺序执行。
- 如果想对某个软限位做调整,请将相应软限位
Enabled?的√去掉,然后Apply,临时解除软限位。 - 严格注意:此时Jog的步进距离务必调到 0.1,防止过大的移动距离,导致贴装头发生碰撞。
- 将贴装头移动到您认可的新位置后,记录此时软件右下角坐标数据中 X或Y 的数值,手动填入相应的软限位中,点击X/Y轴的P键,返回停靠点。
- 再将刚才软限位
Enabled?的 √ 重新打上,然后Apply。 - 点击Jog面板的黑色小房子,重新执行一次Home点的回归。
- 重新按照1~5的过程,修改其他的软限位数值。直至所有您认可的软极限都被修改完毕。
¶ 3、重新软启动
无论您对软极限是否做了修改,我们强烈要求您,进行下面的操作。
修改软极限后,会不同程度的改变当前已经建立好的坐标系,需要重新执行Home点的回归,重新建立坐标系后,方可继续工作。
操作:
请按照下述顺序,重新进行一次软开机流程:
- 请点击Jog操控面板X/Y中间的P键,让贴装头前往停靠点。
- 点击Jog操控面板里红色的软关机按钮,切断软件使能,使贴片机停机。
- 正常停机后,再点击绿色的软开机按钮,等待几秒钟后,贴装头开始移动。
- 此后,先执行轴返回动作,然后进行Home点的视觉归位,最后贴装头会前往停靠点,进入待机状态。
- 至此,新的开机过程结束。
¶ 总结
- 随着视觉基准Home点的引入,贴片机坐标系得到了完善,同时运动精度的表达得到了加强。
- 软极限保障了贴装头的行程安全。
- 每一次只修改一个软极限值,一旦修改,立即执行一次Home点的回归。
所有的软极限修改完成后,需要检查N1N2的手动换嘴坐标。
¶ 刷新后存档
1.刷新
- 点击左上角 Find Issues&Solutions 按钮,刷新出下一组标定内容。
2.存档
- 点击软件左上角的 File - Save configuration(文件-保存配置)后,将.openpnp2文件夹内所有的.xml文件,全选后压缩成压缩文件,文件名:Issue-09
- 即恢复存档节点后,从Issue-09章节开始进行。
- 压缩文件可以放置在.openpnp2文件夹内。
完成上述操作后,我们就可以返回 Issues&Solutions 菜单,继续开展后续的标定内容。请前往下一章。
上一章:Issue-07 返回标定目录 下一章:Issue-09