¶ 什么是MaskCircle蒙板?
- 在视觉通道的编辑中,MaskCircle是常用的一种图像处理手段。
- 用户可以通过MaskCircle通道的数值设定(正数值),自定义出一个大小可调的圆形区域。
- 圆形区域内部的图像是可见的,区域以外的图像都将被舍弃(处理为黑色),通过这种方式,可以屏蔽掉视觉识别过程中的一些干扰元素。
- 基准视觉FiducialVision和底部视觉BottomVision,均可以使用MaskCircle蒙板。
- 基准视觉 FiducialVision,用于识别Mark点或虚拟Mark点。添加MaskCircle蒙板,可以屏蔽补光灯光斑或者Mark点周围有可能存在的钻孔的干扰。
- 底部视觉 BottomVision,用于元件的底部纠偏。正常情况下,底部视觉中是包含MaskCircle蒙板的,只有在需要特殊使用时,需要人为设置MaskCircle项。
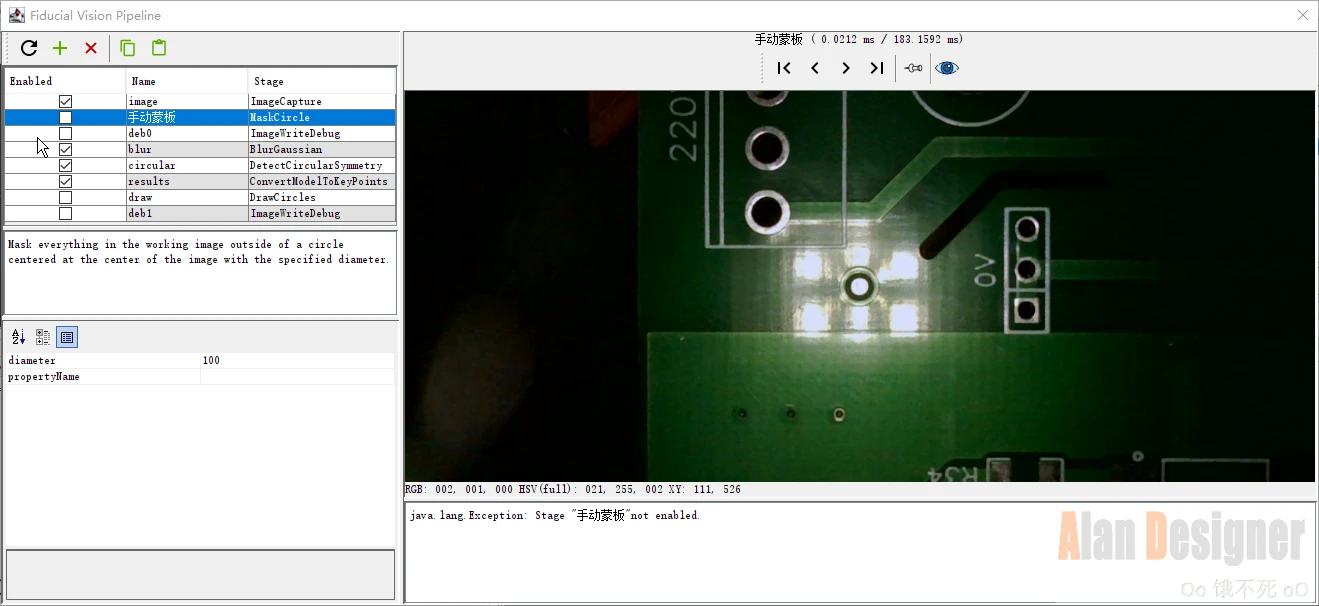
- 演示:基准视觉FiducialVision,添加Maskcircle蒙板的前后对比效果。
¶ 为基准视觉FiducialVision添加MaskCircle
- TORNADOSMT_V2最新的配置文件中,我们已经为大家向默认的基准视觉通道中,注入了【手动蒙板】的这一项。
- 如果您没有这一项,也不要紧,按照下述步骤,手动自行添加即可。
- 更多信息,还可以参考贴片教程-08-Mark点自动巡检章节。
¶ 1、添加MaskCircle蒙板项的演示
演示如下:

需要注意的细节和步骤是:
①首先需要找到并修改,基准视觉方案中的- Default Machine Fiducial Locator -项,以备后续继承。
②视觉通道中的各个项是按照从上到下,依次顺序进行的。
鼠标左键按住 MaskCircle通道项,可以调整其位置和顺序,一般放置于紧接 ImageCapture项的后面,即:ImageCapture拍照后,立即进行Maskcircle蒙板处理。
③MaskCircle通道项中的两个参数:(下图所示)
diameter数值(正数值),控制着蒙板圆形区域的大小,请根据您的实际情况,灵活把控。
propertyName中的MaskCircle文本,删除掉即可。
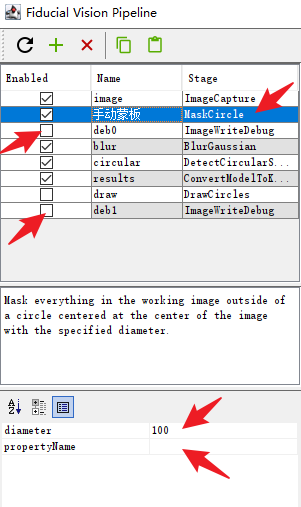
④此外,通道中的deb0和deb1,这两项Enabled的√,请去除掉,上图所示。这两项在某些情况下,会向.openpnp2文件夹中注入大量的.png图像文件,我们不需要使用。
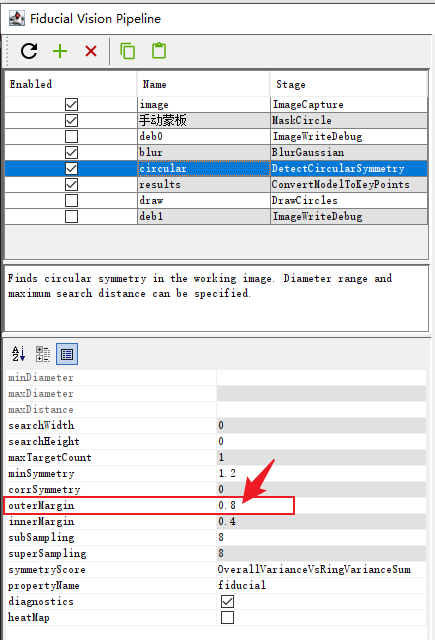
⑤修改circular通道项参数,可以改善对Mark点的识别准确度。(20240629补充,这个在上方动态图中没有展示)
请将基准视觉通道中Name为circular项中的outerMargin数值,由原来的0.2改为0.6~0.8之间的数值。如下图所示。
可以在很大程度上提高对Mark点的识别精度。
⑤OpenPnP中的视觉通道都是被动保存的,只有在关掉通道编辑界面时,才会有保存提示,选【是】即可保存。
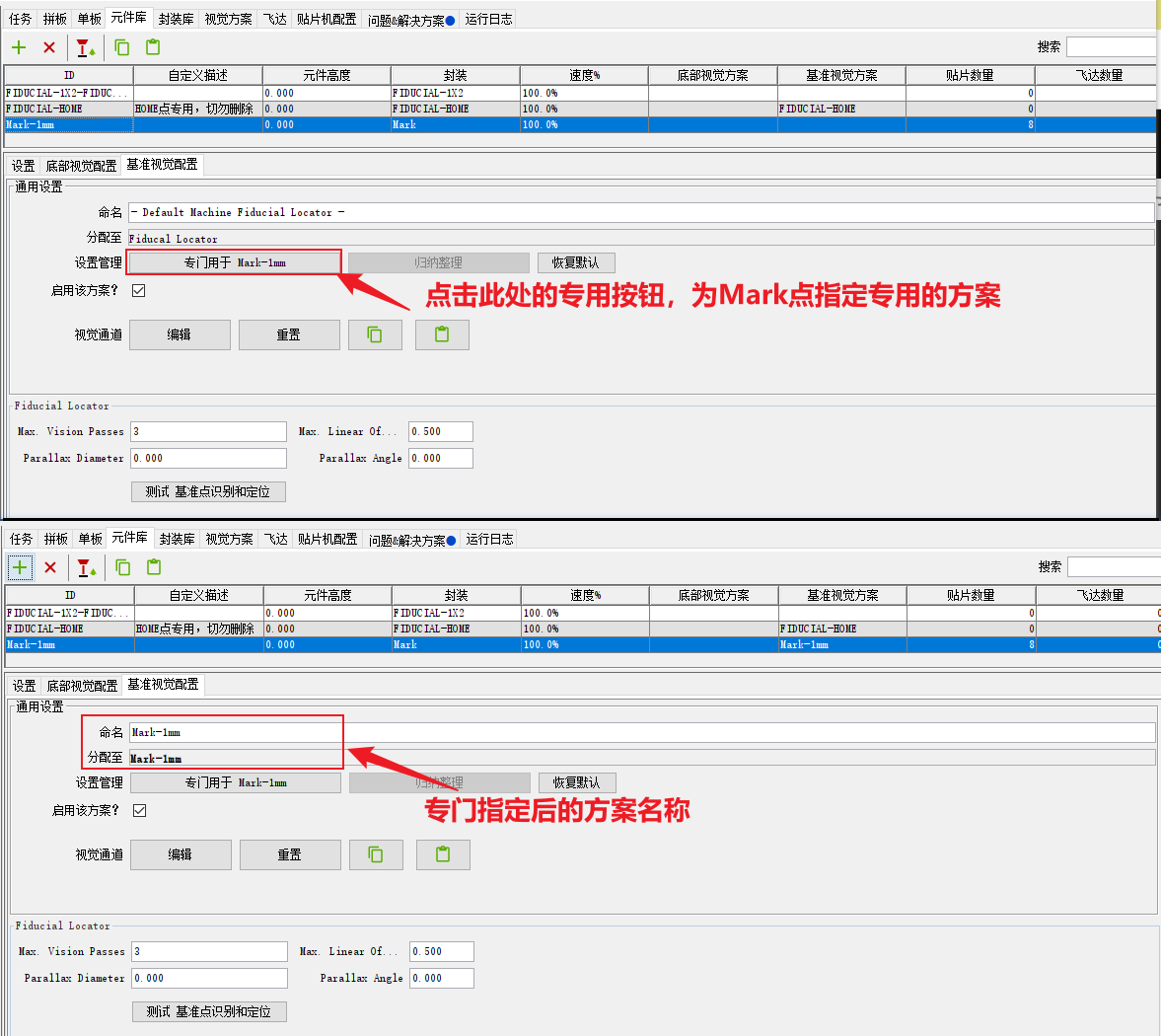
⑥完成 - Default Machine Fiducial Locator - 的修改后,找到您所使用的Mark点,进行专用方案的继承和专门指定。这个在下面会阐述和讲解。
例如我的 Mark-1mm元件,需要点击【专用于 Mark-1mm】按钮,将其使用的方案从默认的方案,指定和专用为Mark-1mm独有的顶部视觉方案。
⑦最后,重复点击几次【测试 基准点识别和定位】按钮,检验蒙板大小是否合适以及识别Mark点的情况是否稳定,根据情况,继续编辑或重新调整蒙板的大小。
该按钮上方的4个参数,在贴片教程-08-Mark点自动巡检章节中有描述,一般使用默认的设定即可。
¶ 2、为Mark点指定专用的基准方案
- OpenPnP中优先继承和默认使用的基准视觉方案名称为:- Default Machine Fiducial Locator -
- 优先继承的意思是,可以通过点击【专用于……】按钮,将默认的 - Default Machine Fiducial Locator -方案,继承并专用给用户新增的Mark点。
- 其实就是,从默认方案中,将其内容誊抄了一份,赋给了目标元件,原理等同于【另存为……】。
- 由于您不同的电路板上,所使用Mark点的尺寸大小或类型,有可能会不尽相同,我还是强烈建议大家,尽量还是在元件库里或者封装库里为Mark点指定其专用的基准视觉方案。
- 专门指定的好处是,您对当前Mark-A点的修改,不会影响其他的Mark-B/C/D的设定。【专门指定,同样也适用于底部视觉】
- 如果不专门指定,那Mark-A/B/C/D所使用的都是默认的方案,对其中任一Mark点视觉通道的修改,其实修改的是 - Default Machine Fiducial Locator -的配置内容。例如修改了Mark-A,那Mark-B/C/D也同样也会相应发生变动。
- 例如下图,我会为我所使用的Mark-1mm的Mark点,指定其独有的视觉方案。
¶ 为底部视觉BottomVision添加MaskCircle
- 正常情况下,底部视觉中是包含MaskCircle蒙板的,其大小由取用该元件所用吸嘴参数的 Max. Part Diameter 最大元件直径值,所决定。
- 一般可以通过调整 Max. Part Diameter 最大元件直径值,来全局修改底部视觉中MaskCircle蒙板的大小。
- 可以参考 吸嘴 -04- 配置吸嘴 章节中关于Max. Part Diameter 最大元件直径的描述。
- 由于并不会像基准视觉那样,很直观的看到蒙板的存在,所以在需要特殊使用时,还是可以人为设置或添加MaskCircle项。
- 特殊使用的情况可能为:元件尺寸较大或极小、吸嘴参数设置的不合理、底部图像中包含了某些反光干扰等等。
请按下面步骤进行操作:
①需要用吸嘴正常吸取一枚想要设定底部视觉方案的元件,以便在底部图像中能有尺寸参考。
而且,该元件拥有其专用的底部视觉方案。参考 贴片教程-10-元件的底部视觉识别 章节的内容。
②执行一次该元件的底部纠偏(居中对齐)操作,将元件置于底部相机的上方。不建议您修改默认的底部视觉方案,因为每个元件的尺寸都是不同的,所需的手动蒙板大小也不尽相同。
③进入通道编辑,找到Name为4的MaskCircle项(下面动态图所示)。
当 propertyName中的文本仅为 MaskCircle 时,diameter数值受控于吸嘴参数的 Max. Part Diameter 最大元件直径值。
当 propertyName中的文本不是 MaskCircle 时,例如修改为 MaskCircle++ 等,diameter数值将变成可编辑的状态。可以由用户任意更改其大小。
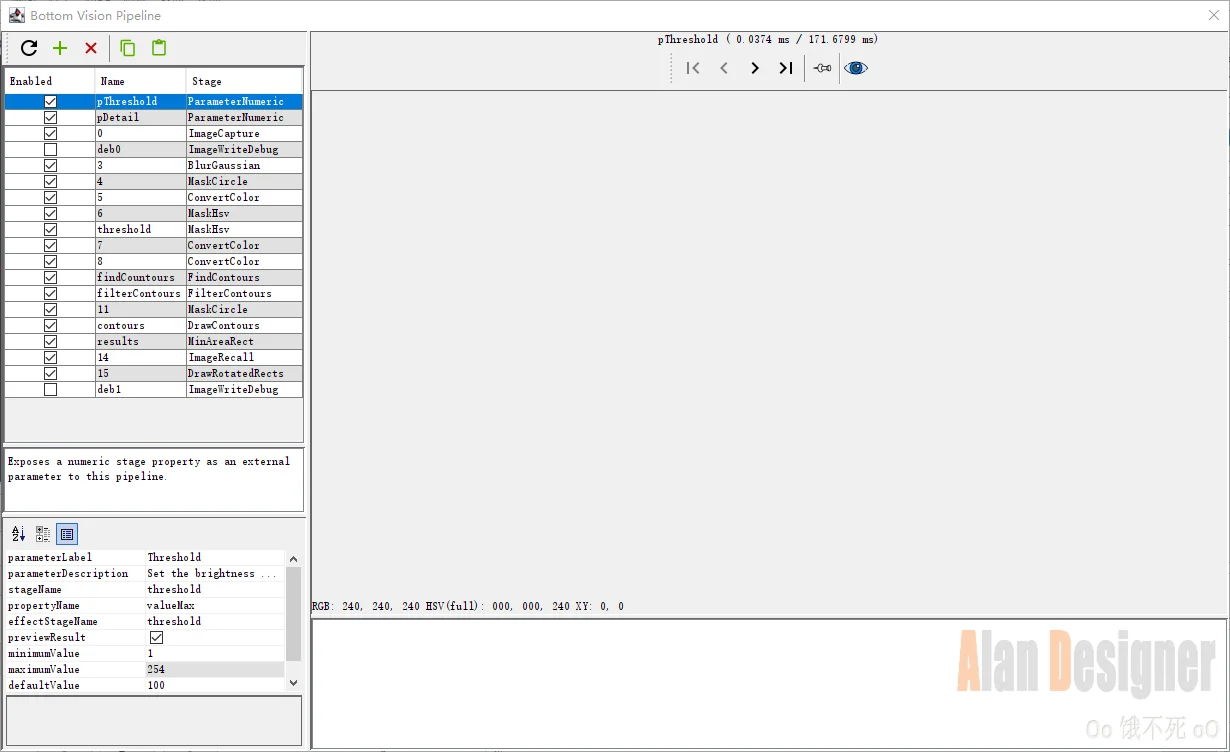
④注意:如果当前修改的是底部视觉默认的 - Default Machine Bottom Vision -方案 ,通道中的deb0和deb1,这两项Enabled的√,请去除掉,这两项在某些情况下,会向.openpnp2文件夹中注入大量的.png图像文件,我们也不需要使用。