老用户们,大家好~~~~
参数更新后,不会对已有任务或数据造成任何影响。可以放心修改。
¶ 如何修改
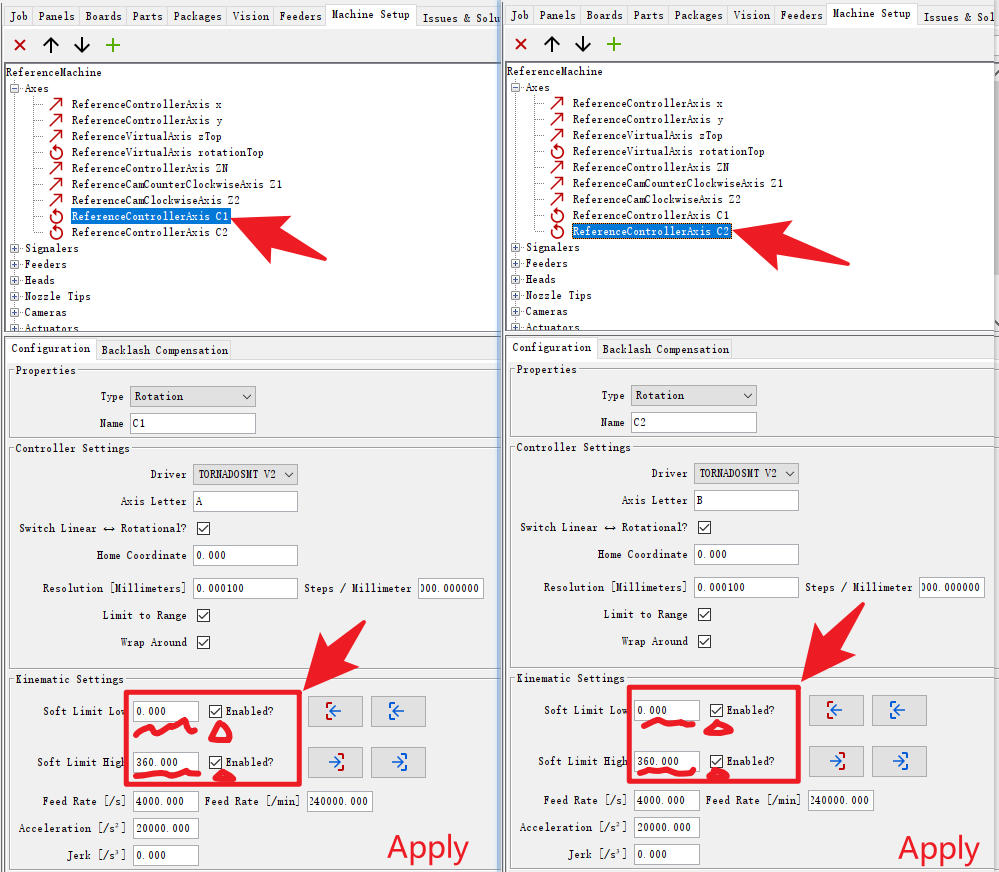
C1低软限位改为 0 ,高软限位改为 360 ,两个 Enabled? 开关,勾选 √ 。最后别忘了右下角的Apply。
C2同理。最后别忘了右下角的Apply。下图示意:
¶ 修改之前
旋转轴softlimit软限位参与了吸嘴同心度校准起始角度的定义。
1、之前同心度校准的动作,是先让吸嘴转半圈,前往 -180,再转一圈360°均分6次进行检测,最后停在+180。
2、导致同心度校准后,吸嘴的0°方位,停在贴片机Y轴0°的反方向。从底部相机画面中,可以看到,那条蓝线是朝下的。
3、查代码后,得到的逻辑:
- ①若未启用C轴软限位,则软件将使用,默认的固定值
±180°作为吸嘴同心度校准的起始位置。 - ②若启用C轴软限位,则使用C1C2定义的软限位数值作为吸嘴同心度校准的起始位置;
- ③之前,我们未启用软限位,所以在日志中的Debug信息中,可以看到这条吸嘴同心度校准的信息:
ReferenceNozzleTipCalibration DEBUG: [nozzleTipCalibration]starting measurement; angleStart: -180.0, angleStop: 180.0, angleIncrement: 60.0, angleSubdivisions: 5
¶ 为何修改
1、 绝大多数由顶部相机捕获的位置坐标或者位置定义,都是基于0°,也就是基于顶部相机蓝线朝上的。例如电动飞达取料位置,电路板的方向等。
2、所以,吸嘴的0°方位和顶部相机0°,也就是与贴片机Y轴0°,不重合并且相反。
3、这样,势必造成,每次吸嘴都需要额外旋转180°,进行调头。是个无价值的多余动作。
4、这种180度的存在,实属叛逆,不仅多余,干扰连续动作的节拍,而且,某种程度上,还增加了动作占用的时间。
5、经常调头,还不利于气管的旋转接头的寿命。