¶ Home点的修复
说明:
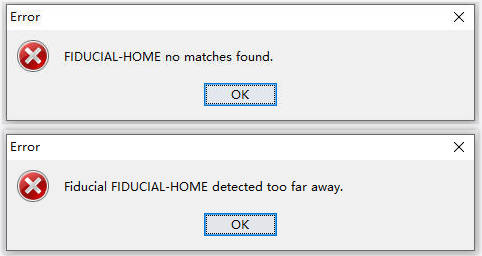
- 如果在标定期间,或日常使用期间,出现关于Home点的报错提示时,请关注本章内容。
- 常见的报错提示有:
¶ 有可能的原因
① 如果在Issue-18标定期间发生的话,很有可能是顶部相机完成高级校准后,影响到了之前对Home点所做的标定结果。
- 请不要担心,可以点击OK按钮,跳过Error。
②如果是日常工作用,出现Home点无法识别,请做如下检查:
- 是否更改过Home点的实际位置,但是没有重新对Home点进行标定?
- Home的小板子是否过脏,请轻微擦拭。
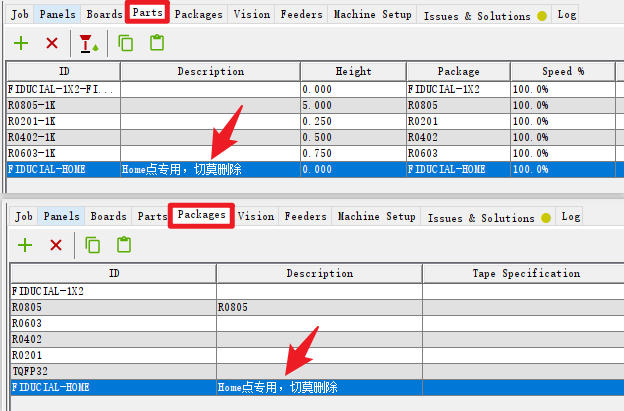
- Part和Package(元件库和封装库)中是否各有一条 FIDUCIAL-HOME 的项。
- Part元件库中 FIDUCIAL-HOME 项的 Package 信息,是否是 FIDUCIAL-HOME 。如下图所示。
如果上述都正常,请继续下面的步骤。如果Home点的识别依然困扰您,请跟我们联系,售后服务。
¶ 操作
1. 复制下方代码:(下框右上角有个copy按钮)
20250315版本后官方对视觉通道做了更新,可用通过滑动条改变蒙板的大小,so,下述代码需要同时更新。目前依然可用。
<cv-pipeline>
<stages>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageCapture" name="image" enabled="true" default-light="true" settle-option="Settle" count="1"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.MaskCircle" name="手动蒙板" enabled="true" diameter="2000" property-name=""/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageWriteDebug" name="deb0" enabled="false" prefix="fidloc_source_" suffix=".png"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.BlurGaussian" name="blur" enabled="false" kernel-size="3" property-name="BlurGaussian"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.DetectCircularSymmetry" name="circular" enabled="true" min-diameter="10" max-diameter="100" max-distance="200" search-width="0" search-height="0" max-target-count="1" min-symmetry="1.2" corr-symmetry="0.0" outer-margin="0.8" inner-margin="0.4" sub-sampling="8" super-sampling="8" symmetry-score="OverallVarianceVsRingVarianceSum" property-name="fiducial" diagnostics="true" heat-map="false"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.ConvertModelToKeyPoints" name="results" enabled="true" model-stage-name="circular"/>
<cv-stage class="org.openpnp.vision.pipeline.stages.DrawCircles" name="draw" enabled="false" circles-stage-name="circular" thickness="1">
<color r="255" g="255" b="0" a="255"/>
<center-color r="255" g="153" b="0" a="255"/>
</cv-stage>
<cv-stage class="org.openpnp.vision.pipeline.stages.ImageWriteDebug" name="deb1" enabled="false" prefix="fidloc_results_" suffix=".png"/>
</stages>
</cv-pipeline>2. 前往下方界面,点击Paste粘贴按钮,将代码植入FIDUCIAL-HOME的视觉通道中。
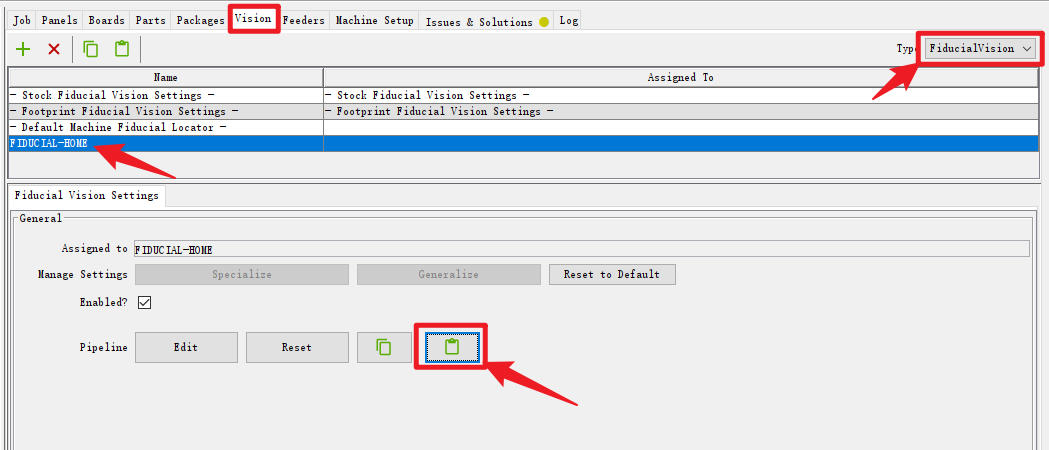
3. 植入后的弹窗中,点击YES,进行确认。
4. 切换到顶部相机画面,并通过鼠标滚轮,推进视角,重新执行Home点的回归,注意观察Home点的识别情况。
¶ 代码解释
上述代码,核心是修改了一个Home点视觉通道中的outer-margin="0.2"参数,将0.2改为0.8。
解释:
①outer-margin="0.2" / inner-margin="0.4"
- 外环边距:在目标直径基础上外扩20%作为检测外环
- 内环边距:在目标直径基础上内缩40%作为检测内环 (通过内外环对比增强对称性检测鲁棒性)
②此外,还增加了一个名为“手动蒙板”的MaskCircle通道项。默认数值为2000。
您可以将顶部相机移动到Home点上,来观察修改这个数值的效果。例如改为:200。
MaskCircle(圆形掩膜):定义了一个直径为像素的圆形区域,将圆形之外的区域裁剪掉,聚焦于圆形区域之内的识别目标体,排除背景干扰。